[i] Базовые сведения о протоколе CAN и реализация работы с разбором кадра данных в микроконтроллере К1986BE92У
Подробную информацию о Controller Area Network (CAN) можно прочесть в Википедии.
В статье будут приведены лишь базовые сведения, и рассмотрена программа, которая позволяет отправить с микроконтроллера К1986ВЕ92У стандартный кадр CAN со скоростью 500 Кбит/с. Для отслеживания и анализа кадра используется осциллограф. Проект прост в реализации и адаптивен под работу с протоколом CAN на других микроконтроллерах производства компании Миландр.
Базовые сведения
-
CAN (англ. Controller Area Network – локальная сеть контроллеров) – стандарт промышленной сети, ориентированный на объединение блоков управления, исполнительных устройств и датчиков в систему.
-
CAN определяет только протокол передачи данных в отрыве от физического уровня. На практике, однако, под CAN обычно понимается сеть с топологией типа «шина», организованная на базе дифференциальной пары, имеющей сигналы CAN_H (can-high) и CAN_L (can-low)
-
Для абстрагирования от среды передачи, стандарт CAN не использует такие понятия, как логические «0» и «1» при определении сигналов. Вместо этого применяются термины «доминантный» и «рецессивный», смысл которых состоит в том, что при одновременной передаче двумя источниками доминантного и рецессивного сигналов, принят будет только доминантный. Стандарт сети требует от физического уровня, фактически, единственного условия: подавление доминантным сигналом рецессивного (но не наоборот).
-
Все устройства должны работать на одной скорости.
-
Шина CAN обязательно должна терминироваться не зависимо от ее скорости. Это достигается путем установки резисторов на концах шины.
-
Информация в сети CAN передается кадрами (англ. frame), имеющими определенную структуру. Кадры бывают следующие:
-
Data Frame (Наиболее частый тип сообщений. Состоит из поля арбитража, поля данных, поля CRC и слота подтверждения)
-
Remote Frame (То же, что и Data Frame, но без поля данных и с выставленным RTR в “1”. Производит инициацию одним из узлов сети передачи в сеть данных другим узлом).
-
Error Frame (Это сообщение, которое явно нарушает формат сообщения CAN).
-
Overload Frame (То же, что и Error Frame, но используется перегруженным узлом).
-
-
Протокол CAN имеет пять механизмов обнаружения ошибок в сети:
-
Контроль передаваемых значений.
-
Вставка битов.
-
Проверка формы кадра.
-
Подтверждение приема.
-
Контрольная сумма.
-
-
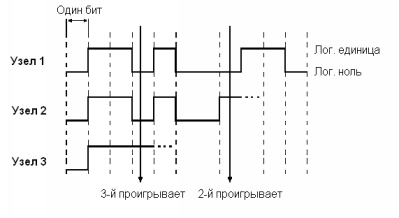
Использование арбитража. Поле арбитража используется в CAN для разрешения коллизий доступа к шине методом не деструктивного арбитража. Суть метода не деструктивного арбитража заключается в следующем: в случае, когда несколько контроллеров начинают одновременную передачу данных в сеть, каждый из них сравнивает бит конкурирующего контроллера со своим. Если значения этих битов равны, оба контроллера передают следующий бит. И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал), будет продолжать передачу, а другой (другие) - прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то устройство не начнет передачу до момента её освобождения. На рисунке 1 наглядно показана работа арбитража в протоколе CAN.
Рисунок 1 - Пример процесса арбитража в протоколе CAN
Проект для передачи стандартного кадра CAN с его последующим разбором
Поскольку работа с проектом ведётся на отладочной плате производства компании Миландр, важно около разъема CAN на отладочной плате поставить перемычку XP15 в положение, указывающем на 500 Кбит/с, что отвечает за скорость работы протокола CAN.
Код для стандартных настроек портов ввода/вывода не рассматривается, все данные доступны для рассмотрения в стандартных примерах из пака для Keil. Особое внимание уделено настройке CAN-блока.
CAN-контроллер использует две линии обмена данными, и они обе должны быть сконфигурированы (CAN_RX - для приёма и CAN_TX - для передачи). На микроконтроллере 1986BE92 за CAN1 отвечают линии PA6 и PA7 соответственно. Стоит отметить, что функция порта альтернативная. После выполненных действий можно приступить к настройке CAN.
Для правильной инициализации модуля CAN нужно придерживаться следующей последовательности действий:
1. Включить тактирование модуля.
2. Сконфигурировать структуру CAN:
// Структура для инициализации модуля
CAN CAN_InitTypeDef CANInitStruct;
// Конфигурация модуля
CAN1 CANInitStruct.CAN_ROP = DISABLE; // Прием собственных пакетов отключено
CANInitStruct.CAN_SAP = DISABLE; // Подтверждение приема отключено
CANInitStruct.CAN_STM = DISABLE; // Режим самотестирования отключен
CANInitStruct.CAN_ROM = DISABLE; // Режим "только чтение" отключен
CANInitStruct.CAN_PSEG = CAN_PSEG_Mul_2TQ; // Битовый сегмент. Длительность PS
CANInitStruct.CAN_SEG1 = CAN_SEG1_Mul_4TQ; // Битовый сегмент. Длительность PBS1
CANInitStruct.CAN_SEG2 = CAN_SEG2_Mul_3TQ; // Битовый сегмент. Длительность PBS2 CANInitStruct.CAN_SJW = CAN_SJW_Mul_2TQ; // Интервал перестройки сегментов
CANInitStruct.CAN_SB = CAN_SB_1_SAMPLE; // Режим выборки
CANInitStruct.CAN_BRP = 15; // Предделитель тактовой частоты
CANInitStruct.CAN_OVER_ERROR_MAX = 255; // Максимальное значение счетчика ошибок до установки флага Фрагмент кода 1 3. Настроить аппаратные прерывания. В приведённом проекте они использованы не будут.
4. Активировать модуль:
// Включение модуля
CAN1 CAN_Cmd(MDR_CAN1, ENABLE);Фрагмент кода 2 Для передачи данных в стандартной библиотеке SPL предусмотрена специальная структура CAN_TxMsgTypeDef, которая настраивает кадр (фрейм) передающих данных:
// Формирование кадра данных
CAN_TxMsgTypeDef tx_frame;
tx_frame.ID = 0x19ABFFFF; // Идентификатор кадра данных
tx_frame.PRIOR_0 = 1; // Приоритет кадра данных
tx_frame.IDE = CAN_ID_STD; // Формат кадра данных - стандартный
tx_frame.DLC = 1; // Длина поля данных (в байтах)
tx_frame.Data[0] = 0x000000AA; // Первые четыре байта данных
tx_frame.Data[1] = 0x00000000; // Вторые четыре байта данных Фрагмент кода 3 При настройке стандартного идентификатора (содержит 11 бит) кадра данных следует помнить, что, согласно спецификации, для правильной настройки нужно задействовать биты с 18-го по 28-й. В рассматриваемой программе для стандартного идентификатора было взято число 0x19ABFFFF, и старшие 11 бит двоичного представления будут являться стандартным идентификатором.
Для передачи сформированного кадра необходимо воспользоваться следующую функцию:
// Передача кадра
CAN_Transmit(MDR_CAN1, TX_BUFFER_NUMBER, &tx_frame);Фрагмент кода 4 Основной код готов. Однако, если в проекте необходимо принимать данные по CAN, то для этого используется буфер:
// Настройка буфера на прием кадров
CAN_Receive(MDR_CAN1, RX_BUFFER_NUMBER, DISABLE); // Третий аргумент отвечает за возможность перезаписи принятых данныхФрагмент кода 5 И настройка структуры CAN_RxMsgTypeDef для приёма данных описывается следующим образом:
// Структура для приема кадра
CAN_RxMsgTypeDef rx_frame;
// Извлечение данных из буфера
CAN_GetRawReceivedData(MDR_CAN1, RX_BUFFER_NUMBER, &rx_frame);Фрагмент кода 6 Приём кадра данных осциллографом. Разбор кадра
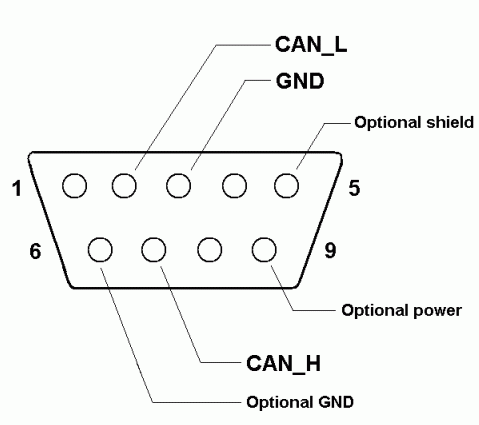
Для подключения осциллографа при анализе обмена используются линии CAN_H и CAN_L. На рисунке 2 показано расположение этих линий на стандартном разъеме DB9F:
При подключении осциллографа к микроконтроллеру, он будет отображать непрерывный сигнал с кадром данных, который был сформирован в программе. Примерный вид и разбор кадра приведены на рисунке 3:
Рисунок 3 - Осциллограмма кадра данных CAN и его разбор
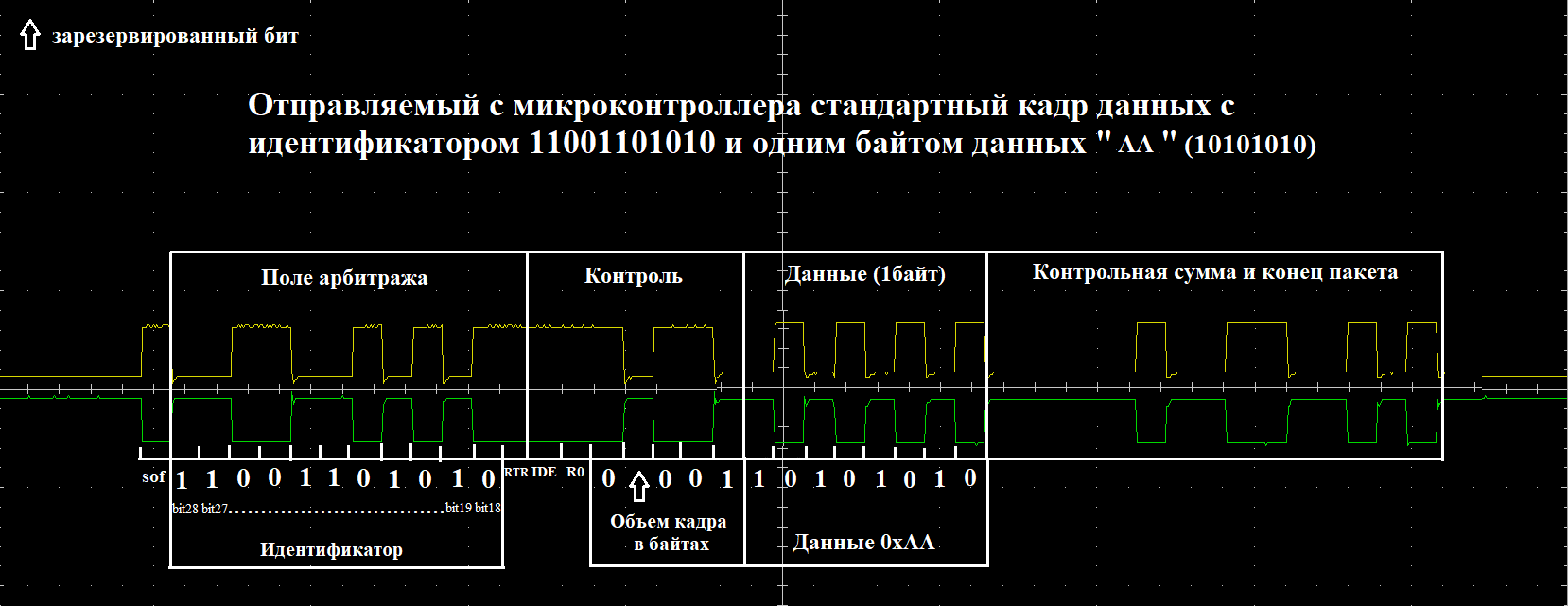
Пояснения:
Бит sof указывает на начало передачи кадра.
Бит RTR определяет тип кадра.
Бит IDE определяет формат кадра.
Бит R0 зарезервированный, и согласно протоколу должен иметь доминантное значение, то есть логический “0”.
Объем кадра в приведенном проекте равен одному байту, это значение задавалось в поле DLС при формировании кадра в коде.
На основании выбранного объема кадра как раз-таки виден один байт информации, который был задан программно.
При увеличении объема кадра DLC, который может быть в диапазоне от одного до восьми, будет наблюдаться расширение кадра пропорционально введенному количеству байт, а сами байты информации могут задаваться в конфигурационных полях tx_frame.Data[0] и tx_frame.Data[1]
Frame Format
Стандартный и расширенный кадры отличаются только полем арбитража и одним битом в поле контроля. Расширенный формат введен для того, чтобы увеличить разрядность поля ID. Перестановки в битах, выделенные на рисунке 4 цветом, сделаны так, чтобы сохранилась совместимость со стандартным форматом кадра.
Рисунок 4 - Структура стандартного и расширенного кадров данных CAN

Прерывания
Запрос на прерывание передачи (флаг CAN_TX[x] в регистре MDR_CANx→TX) происходит, когда разрешенный буфер на передачу НЕ имеет запроса на отправку сообщения (TX_REQ = 0, регистр MDR_CANx→BUF_CON[x])
Сохранить статью в PDF